


대학소개
입학·국제교류
대학·대학원
대학생활
산학·연구
취업·창업
정보·민원서비스
| 제목 | 서울과기대 윤현식 교수 연구팀, 불가사리 모방 수중 접착 로봇 연구 Science Advances 논문 게재 | 날짜 | 2025-07-24 | 조회수 | 21 |
|---|---|---|---|---|---|
| 작성자 | 홍보실 | ||||
| 첨부파일 | |||||
|
[자료문의〕서울과학기술대학교 에너지바이오대학 화공생명공학과 윤현식 교수(☎ 02-970-6607)
서울과기대 윤현식 교수 연구팀, 불가사리 모방 수중 접착 로봇 연구 Science Advances 논문 게재 - 불가사리 관족에서 영감을 받은 차세대 수중 접착 로봇
□ 서울과학기술대학교(총장 김동환, 이하 서울과기대) 화공생명공학과 윤현식 교수 연구팀이 수행한 연구 결과가 미국 동부 시간 기준 7월 23일, 다학제 분야의 저명한 국제학술지 Science Advances에 「Starfish-Inspired Tube Feet for Temporary and Switchable Underwater Adhesion and Transportation」이라는 제목으로 게재되었다.
□ 소프트 로보틱스는 말랑하고 유연한 소재를 이용해 사람과 안전하게 상호작용하고, 복잡하고 변화무쌍한 환경에서도 안정적으로 작동하는 차세대 로봇 기술이다. 최근에는 바닷속에서 물체를 집거나 운반하는 수중 로봇 기술에도 많이 활용되고 있지만, 물속에서는 물체에 단단히 붙거나 쉽게 떼어내는 것이 쉽지 않아 여전히 해결해야 할 과제가 많다. 기존의 접착 기술은 주로 마른 환경에서 사용하도록 만들어져 있어, 수중에서는 접착력이 크게 떨어지는 문제가 있다.
□ 이를 해결하기 위해, 연구자들은 자연에서 해답을 찾고 있다. 문어, 홍합, 불가사리 같은 해양 생물은 물속에서도 자유롭게 붙었다 떨어지는 능력을 갖고 있기 때문이다. 이 생물들은 단순히 빨판처럼 붙는 것을 넘어, 주변 환경에 맞게 몸의 형태를 바꾸거나 외부 자극에 반응해 부착과 탈착을 조절하는 정교한 시스템을 갖추고 있다.
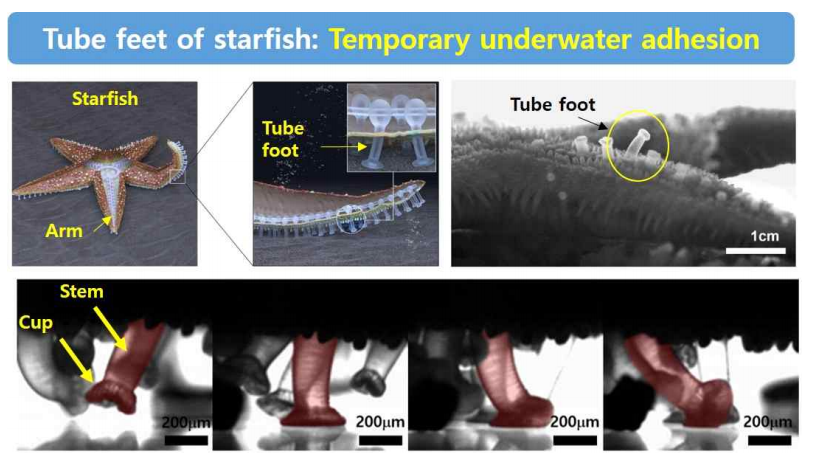
□ 본 연구는 그중에서도 불가사리의 ‘관족’이라는 구조에 주목하였다. 불가사리는 이 관족을 이용해 바위에 붙거나 모래 속을 파고들며 움직인다. 연구진은 이 구조를 모방해 수중에서도 강하게 붙고 쉽게 떼어낼 수 있는 새로운 접착 기술을 개발하였다.
□ 본 연구는 불가사리의 관족 구조와 움직임에서 영감을 받아, 수중 환경에서 강한 접착과 빠른 탈착이 가능한 인공 관족(artificial tube foot)을 개발한 것이다. 불가사리의 관족은 길쭉한 원통형 줄기(stem)와 부드러운 말단(mouth)으로 이루어져 있으며, 외부 자극에 따라 말단이 퍼지면서 표면에 밀착되는 구조적 특성을 지닌다. 이를 모사하기 위해, 연구진은 서로 다른 팽윤 특성을 가진 두 종류의 고분자 실린더를 직렬로 접합하는 구조를 고안하였다. 하부 실린더는 팽윤성이 낮은 고분자로 구성되어 있으며, 상부 실린더는 수분에 반응하여 팽창하는 하이드로젤로 이루어져 있다. 이러한 조합은 물속에서 상부 실린더가 팽창하면서 원통형 구조가 컵 모양의 마우스로 변형되고, 기질 표면에 단단히 밀착되는 새로운 형태의 수중 접착 구조를 형성하였다.
□ 이 인공 관족은 열, 공기압, 전단력, 빛 등 다양한 외부 자극에 반응하여 빠르게 탈착이 가능한 점이 특징이다. 다양한 자극에 반응하는 멀티모달 시스템은 기존의 단일 자극 기반 탈착 기술보다 훨씬 높은 조작성과 응용 가능성을 제공한다.
□ 이번 연구는 불가사리의 관족 구조에서 착안한 새로운 수중 접착 시스템을 통해, 차세대 소프트 로보틱스 기술의 적용 범위를 크게 확장할 수 있는 가능성을 제시한 결과이다. 특히, 다양한 외부 자극에 반응하여 스스로 탈착이 가능한 구조는 마이크로 LED의 전사 로봇 기술에 적용할 수 있다. 이번 연구는 복잡한 마이크로 가공 공정 없이 단순한 구조로 고기능을 구현함으로써, 대면적 생산 및 상용화 가능성 측면에서도 강점을 갖는다. 기술적 단순성과 고성능의 균형을 확보함으로써, 산업적 응용을 위한 스케일업 가능성이 매우 높다.
□ 본 연구는 한국연구재단의 중견연구자지원사업과 중점연구소 사업의 지원으로 수행되었다.
□ 또한 본 성과는 University of Pennsylvania의 접착 전문가인 Kevin Turner 교수 및 재료공학 분야 권위자인 Shu Yang 교수와의 국제공동연구를 통해 수행되었으며, 중견연구자지원사업의 국제화 사업 지원 아래 이뤄진 연구라는 점에서도 그 의미가 크다. 생체모사 기반의 융합 연구가 국내 연구진의 주도로 세계적 석학과의 협력을 통해 결실을 맺었다는 점에서, 향후 글로벌 기술 경쟁력 확보 및 후속 공동연구 확대의 토대가 될 것으로 기대된다.
▲ 서울과학기술대학교 화공생명공학과 윤현식 교수
▲ Starfish |
|||||

 담당부서 : 홍보실
담당부서 : 홍보실
 전화번호: 02-970-6994
전화번호: 02-970-6994







;){kind=link}
;){kind=link}